http://opmregisters.web.fc2.com/ras68k/
このページ掲載時点での最新は v0.60 (20230521)です。
元は X68000 用なのですが、それ以外のマシンへの実例/覚書として幾つか情報を残しておきます。
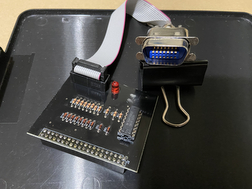
ハード的な工作に関しては↓の「ホストマシン側」をご覧ください。
ラズパイ側 OS は新し目めのバージョンでも大丈夫でした。SD カードは高速な物の方がストレスなくて良いです。
筆者は Raspberry Pi 3B+ を使っていますが 4 でも使えるようです。
電源は余裕のあるものが良いです。low power 警告が頻発するようなのは実用の見地からも精神衛生上も×。

音声出力にはラズパイ本体の 3.5mm 端子がお手軽なのですが、この端子は 4 極(音声出力+入力)になっていて少し特殊なのと、伝統的にココから出る音は音質が悪いようです。
テストしてみて酷いようであれば USB オーディオ増設もアリでしょう。
いずれにせよ、最初にすべきことはラズパイからちゃんと音が出るか確認することです。
まずは aplay -l でオーディオデバイスを列挙してみましょう。

音声出力先デバイスとして 3.5mm 端子と Sound Blaster Play!3(USB 接続)と HDMI の三つが挙げられています。
このうち "card x" と "device y" という部分が大事なので覚えておきます。
次は amixer でミキサーコントロールを調べます。

ここでは 'PCM' というミキサーコントロール名を覚えておきます。
OS のバージョンによっては 'Headphone' という名前になっているかもしれません。
では実際に音が出るか確かめてみます。今回は 3.5mm 端子(card=0,device=0)からの出力とします。
$ speaker-test -D hw:0,0 -t sine -f 600 |
これでサイン波の「ポー」という音が聞こえれば Ok です。"-D hw:" の後は aplay で調べた card 番号と device 番号です。
外部 USB 音源などでは -D の後を plughw:1,0 などとしなければならない環境もあるようです。
消音は CTRL+C です。
音が出ることが確認出来たら、ras68k-ext の設定ファイル pi68k.sh を編集して反映させておきます。

"hw:0,0" の部分を aplay で調べたカード番号、デバイス番号にします。今回は 3.5mm からの出力なので変更なし。
こちらも環境によっては "plughw:1,0" などのように書き換えます。
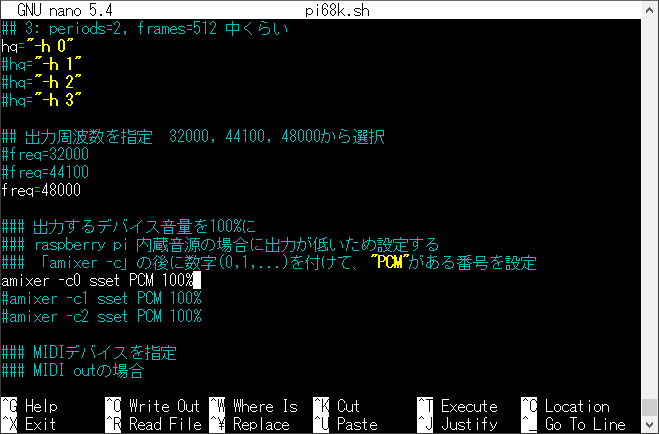
"-c" の後の "0" はカード番号、"sset" の後は amixer で調べたミキサーコントロール名にしておきます。
さきほど調べた結果 "PCM" だったのでここも変更なし。"Headphone" や "Speaker" だった場合は書き換えます。
$ sudo ./pi68k.sh start |
無事に起動できればずらずらっと流れて以下のようになります。
これでホスト側からの指示待ち受け状態に。

FluidSynth 対応バージョンあたりから色々ライブラリが足りなくて起動しない場合があるので、少し古いバージョンの方が良いかも…。
動作中に underrun occur メッセージが頻発するようなら再度環境を見直した方が良いかもしれません。

