以下の記事の取り扱いには十分注意してください。
さて、基礎編「通信ポートで遊ぶ」では RS-232C 方式で他の機器とやりとりできるようになったわけですが、
信号タイミングを作っている間は CPU は何もできませんし、通信用のハードもちょっとゴツいですよね。
やはり I/O ポートに 1 byte ポンと書き込んで「コレ送っといて」と指示したら、後はハードが勝手に通信しておいてくれるのが理想です。
というわけで、GB ネイティブ通信の基本に立ち返ってなんとか出来ないか考えてみることにします。
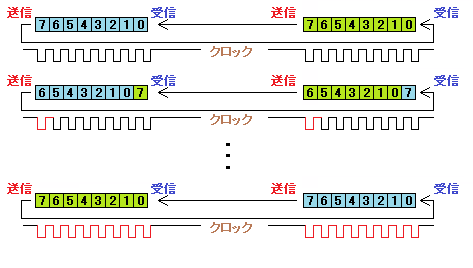
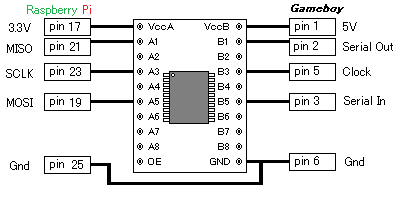
図の通り、GB では 送信、受信、クロックの 3 本のラインで接続します。
送受信はクロック信号に従って 1bit ずつ同時に行います。8 クロックで 1byte 分の送受信が完了。
一連の作業はハードがやってくれるので CPU は「コレ送っといて」と指示するだけで Ok です。
で、SPI(=Serial Periferal Interface) という通信方式もこれとほとんど同じだったりするのです。
複数の機器を同時に使えるように CE(=Chip Enable) 線があったり、クロックの立ち上がり/下がりタイミングを設定できたり
最上位ビットからでなく最下位ビットから送るように出来たりと、細かい違いはありますが基本的には同じ 3 本のラインでの通信。
他に I2C という通信方式もあります。これはデータ+クロックの2本だけでやりとりするようです。詳細は割愛。
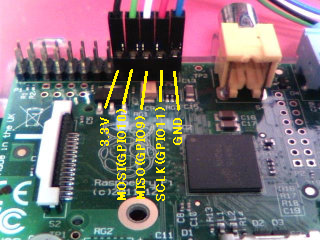
今回は GB の相手となる SPI 搭載マシンとして Raspberry Pi を選択します。なんといっても資料多いですしねー。
そうそう、SPI に関していくつか注意点があります。
- GB 同士の場合はマスター/スレーブの明確な区別は無くどちらがクロックを駆動しても(マスターになっても)良いです。
SPI ではマスター/スレーブは明確に決められています。クロックを駆動する方がマスターです。
Raspberry Pi はマスター側としてしか動かせない(たぶん)ので、今回は必然的に GB がスレーブになります。
- GB の通信ポートは信号レベルが 5V ですが RPi の SPI は 3.3V なので電圧の相互変換が必要です。後述。
- OS に Raspbian を選択した場合、標準では SPI は使えないようになっているので、少々作業が必要です。これも後述。
- 上の図の通り、クロック信号に従って 1bit ずつやりとりをします。
つまり、い〜ち〜、に〜い〜、とするよりイチ!ニ!サン!シ! としたほうが速く通信できるわけなのですが、
RPi の SPI ではクロックを 32MHz 程度まで上げられるそうです。
対して GB はそんなに速くないので、正常に通信できる速度を手探りで弾き出す必要があります。これも後述。
- 上の図の通り、通信は双方が協調して行いますが、送信側に送るデータが無いのに受信側がクロックを駆動するとどうなるかというと・・・
受信バッファに残った直近のビット情報 0 又は 1 を延々と拾い続けてしまうのです。
結果として 00000000=0x00 11111111=0xFF が受信されてしまいます。
受信側から見て、これが正常なデータかヌルデータか区別することは難しいので、何らかの対策が必要になります。これまた後述。